“Reflection is one of the most underused yet powerful tools for success.”
―Richard Carlson
SubsectionDihedral Groups
Definition1.51.Isometry and Symmetry.
For any integer \(n \geq 3\text{,}\) let \(P_n\) denote a regular \(n\)-gon. An isometry of the plane is a function \(f: {\mathbb{R}}^2 \to {\mathbb{R}}^2\) that is a bijection and preserves the Euclidean distance \((d(f(A),f(B))=d(A,B)\) for any \(A,B\in {\mathbb{R}}^2\)). A symmetry of \(P_n\) is an isometry that maps \(P_n\) to itself.
Remark1.52.
By the latter I don’t mean that \(f\) fixes each of the points of \(P_n\text{,}\) but rather that \(f(P_n) = P_n\text{,}\) that is every point of \(P_n\) is mapped to a (possibly different) point of \(P_n\) and every point of \(P_n\) is the image of some point in \(P_n\) via \(f\text{.}\)
There are three natural types of isometry in \(\R^2:\)
rotations about a point,
reflections in a line,
and translations: in the latter the point \((x, y)\) is moved to \((x + a, y + b)\) for some fixed \(a, b\text{.}\)
It can be shown that every isometry is a rotation, a translation, a reflection, or the product of a reflection and a translation.
Exercise1.53.Composition of Symmetries.
The Composition of two symmetries of \(P_n\) is again a symmetry of \(P_n\text{.}\)
Solution.
Let \(R = S \circ T\) be the composition of \(S\) and \(T\text{,}\) where \(\circ \) denotes composition. Let’s take an arbitrary point \(P\) on the object. When we apply the symmetry \(S\) to \(P\text{,}\) it is mapped to a new point, let’s call it \(P1\text{.}\) Since \(S\) is a symmetry, \(P1\) is still on the object. Next, when we apply the symmetry \(T\) to \(P1\text{,}\) it is mapped to a new point, let’s call it \(P2\text{.}\) Again, since \(T\) is a symmetry, \(P2\) is still on the object. Therefore, the composition \(R = S \circ T\) maps the point \(P\) on the object to the point \(P2\text{,}\) which is also on the object. Hence, the composition of symmetries is again a symmetry.
Definition1.54.Dihedral Group.
The dihedral group\(D_{2n}\) is the set of symmetries of the regular \(n\)-gon \(P_n\) equipped with the binary operation given by composition.
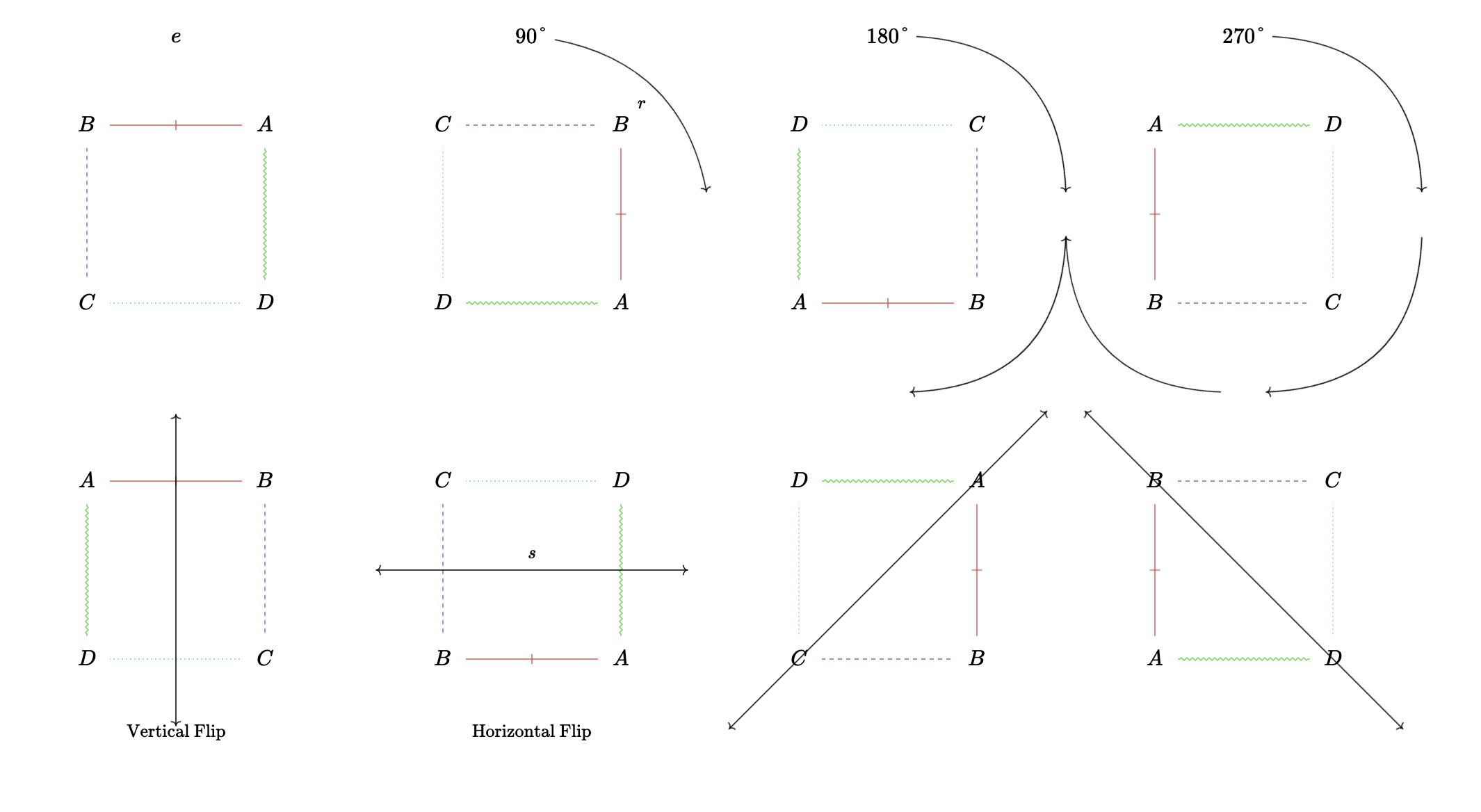
Example1.55.Rotations and Reflections.
Assume that the regular \(n\)-gon \(P_n\) is drawn in the plane with its center at the origin and one vertex on the \(x\) axis.
If \(r\) denotes rotation about the origin by \(\frac{2\pi}{n}\) radians counter-clockwise, then \(r \in D_{2n}\text{.}\) It’s inverse is rotation by \(\frac{2\pi}{n}\) clock-wise.
For another example, for any line of symmetry of \(P_n\text{,}\) reflection about that line gives an element of \(D_{2n}\text{.}\) By our convention for how to draw \(P_n\text{,}\) the \(x\)-axis is a line of symmetry for \(P_n\text{,}\) and we let \(s\) denote reflection about the \(x\)-axis.
We see \(|r|=n\) and \(|s|=2\text{,}\) which may make some intuitive sense. The fact that \(sr\) is a reflection and hence that \(srsr=e_{{\mathbb{R}}^2}\) may be slightly less aparent.
Proposition1.58.Order of \(D_{2n}\).
Every element in \(D_{2n}\) can be written as \(r^j\) or \(r^js\) for \(0 \leq j \leq n-1\text{.}\)
\(\displaystyle |D_{2n}|=2n\)
Proof.
We will use some geometric notions freely without complete justification. For example, we use that if an isometry of \({\mathbb{R}}^2\) fixes two points \(A\) and \(B\text{,}\) then it is either the identity element or it is reflection about the line \(AB\text{.}\) We also use that every element of \(D_{2n}\) maps the origin to itself (since the origin is the center of mass of \(P_n\)). Finally, we use that every isometry of \({\mathbb{R}}^2\) is either orientation preserving or orientation reversing.
Label the vertices of \(P_n\) as \(V_0, \dots, V_{n-1}\text{,}\) with \(V_0\) being the vertex located on the positive \(s\)-axis, \(V_1\) being the vertex adjacent to \(V_0\) in the counter-clockwise direction, etc. We have \(r(V_0) = V_1\text{,}\)\(r(V_1) = V_2\text{,}\) etc., and so \(r^j(V_0) = V_{j \pmod{n}}\text{.}\) Moreover any isometry must send a vertex to a vertex because the vertices are the points on \(P_n\) at largest distance from the origin.
Let \(\alpha\) be an arbitrary symmetry of \(P_n\text{.}\) Then \(\alpha(V_0) =V_ j\) for some \(0 \leq j \leq n-1\text{.}\) Then the element \(r^{-j}\alpha\) fixes \(V_0\) and the origin, and hence either \(r^{-j}\alpha= e\) or \(r^{-j}\alpha= s\) from the discussion above. We get that \(\alpha= r^j\) or \(\alpha= r^js\text{,}\) proving the first assertion.
Since \(r^j(V_0) = V_{j \pmod{n}}\text{,}\) we see that if \(r^j = r^i\) for \(0 \leq i,j \leq n-1\text{,}\) then \(i=j\text{.}\) We have \(r^js \ne r^i\) for any \(i,j\) since the former is orientation reversing and the latter is orientation preserving. If \(r^is = r^js\) for \(0 \leq i,j \leq n-1\text{,}\) then upon multiplying on the left of \(s^{-1}\) we get \(i=j\text{.}\)